点到直线的距离 #
本文介绍直线的表示方式,以及如何计算一个点到直线的距离。
直线的表示方式 #
参数化形式 #
直线的参数化形式是通过直线的方向向量定义的,假设直线的方向向量为 d,直线上有一点 P,则直线上的任意一点都存在一个 t,可以使点用 P+td表示。
所以直线的参数化形式为:
X(t)=P+tdt∈R对于射线,也可以用这个公式表示,只不过射线的参数满足 t>0。
隐含形式 #
假设直线的法向量是 n,直线上的某个点用 X=(x0,x1) 表示,如果点 P 是直线上的一个点,则向量 PX与 n的点积为 0。即 n⋅(X−P)=n⋅X−n⋅P=0,另 n⋅P=d,则可得到:
n⋅X=d这就是直线的隐含表示方式(法线形式)。
点到直线的距离 #
参数化形式 #
对于参数化直线方程 X(t)=P+td,要计算点到直线的距离,就是要计算点到其再直线上的投影点的距离,例如下图中点 Y 到 X(t) 的距离。
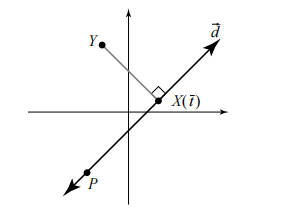
首先要明确的是 Y−X(t) 一定是垂直与直线向量 d的,所以两个向量的点积为 0。
0=d⋅(Y−X(t))=d⋅(Y−P−td)=d⋅(Y−P)−t∣d∣2所以投影点的参数 t=d⋅(Y−P)/∣d∣2。
所以点到直线的距离的平方就是 ∣Y−(P+td)∣2。
隐含形式 #
如果直线的方程是用法向量表示的 n⋅X=c,点到直线上最近的一个点 K,一定存在一个 s 满足 Y=K+sn,将等式两边点乘一个 n得到 n⋅Y=n⋅K+s∣n∣2=c+s∣n∣2,所以 s=(n⋅Y−c)/∣n∣2。
点到直线的距离为 ∣Y−K∣=∣s∣∣n∣,即:
Distance(Y,Line)=∣n∣n⋅Y−c如果法向量是单位向量,上述公式简化为:
Distance(Y,Line)=n⋅Y−c点到射线的距离 #
当能够计算点到直线的距离时,点到射线的距离也就很容易计算了。射线上的起点为 P,方向向量为 d。
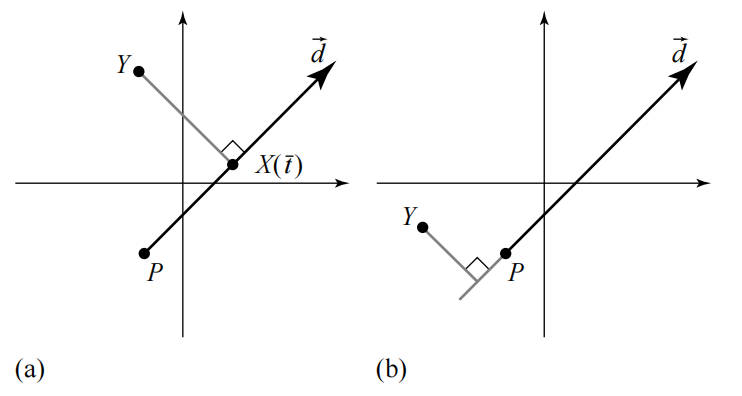
- d⋅(Y−P)>0: 如果点 Y 的投影点 X(t) 在射线上时,点到射线的最近点就是投影点 X(t),如上图 a 所示。
- d⋅(Y−P)≤0:如果点 Y 的投影点 X(t) 不在射线上时,点到射线的最近点就是射线的起点 P,如上图 b 所示。
点到线段的距离 #
点到线段的距离分为三种情况。点的投影点 (t) 可能在线段的起点前、终点后或者落到线段上。
- 投影点 (t) 在起点前,点到线段的最近点为起点
- 投影点 (t) 在终点后,点到线段的最近点为终点
- 投影点 (t) 在线段上,到店线段的最近点为 (t)
点到凸多边形的距离 #
计算点 X 到多边形的距离就变得十分简单,只需要计算点 X 到每条边的距离,然后取最小值即可。
这样简单粗暴的方式并不是这里要说明的。凸多边形(convex polygon)有一个性质,对于凸多边形外的点,凸多边形总有一些边对点是不可见的,所以计算点到凸多边形的距离,只需要计算点到可见边的最小距离。
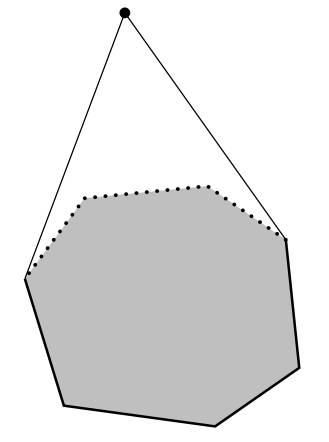
图中可见边用虚线表示,不可见边用实线表示。所以问题就变成了过滤不可见边。
假设凸多边形由 P0⋅Pn 表示,每条边 PiPi+1 都有一个指向凸多边形内部的法向量 ni,如果一条边满足 (X−Pi)⋅ni<0 则该边就是可见边。
这种利用点积过滤的方式,速度非常快,避免了计算每条边到点 X 的距离。
另一种判断可见边的方式是,画一条线段 XPi,如果 XPi 与凸多边形的某条边相交则表示该边是不可见边,但是该算法需要计算线段线段相交性,速度不快,所以不提倡用这种方式。
(完)